type
status
date
Jun 21, 2023 09:35 AM
slug
summary
tags
category
icon
password
双目相机测距:
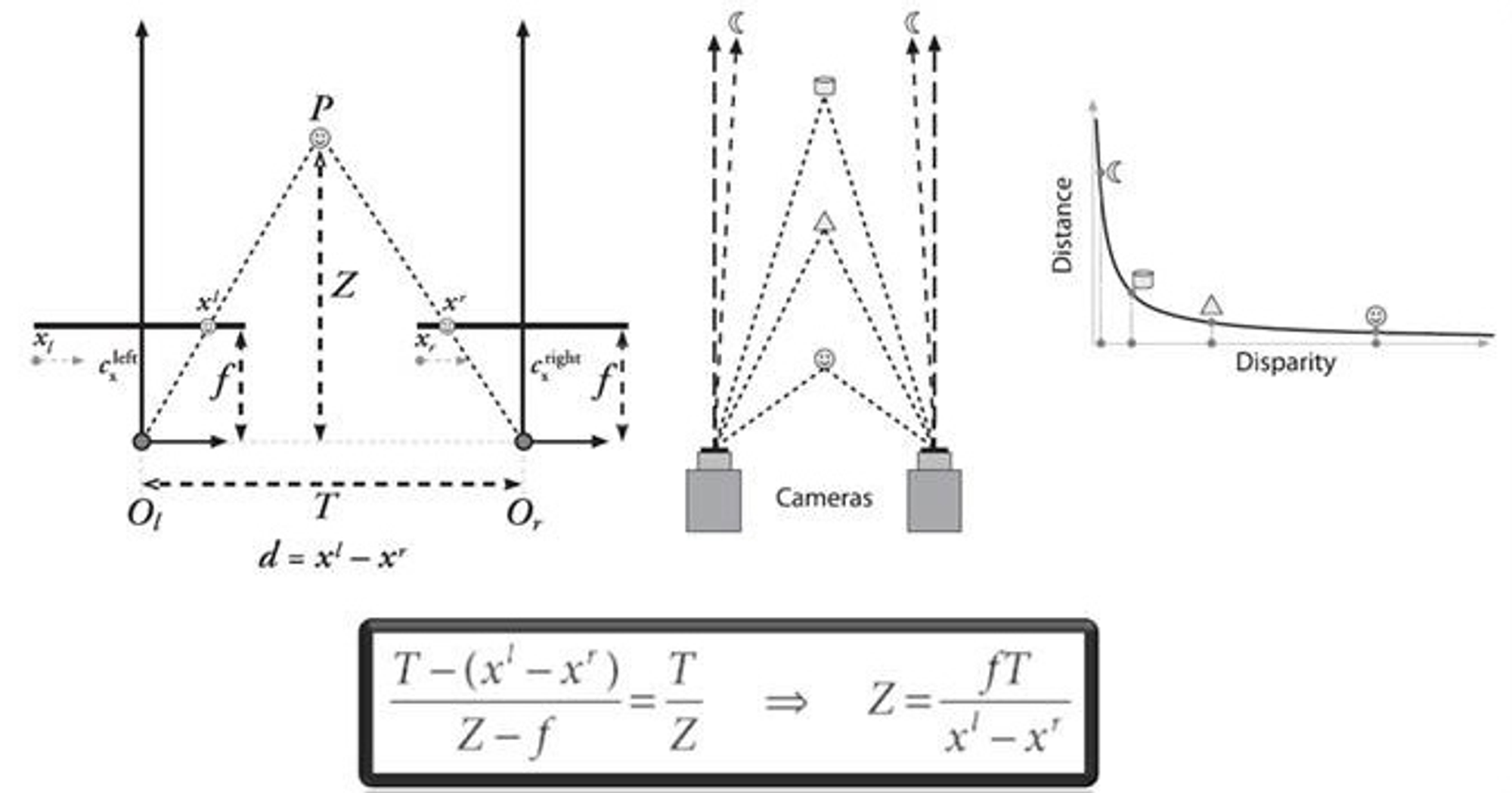
通过对两幅图像视差的计算,直接对前方景物(图像所拍摄到的范围)进行距离测量,而无需判断前方出现的是什么类型的障碍物。所以对于任何类型的障碍物,都能根据距离信息的变化,进行必要的预警或制动。双目摄像头的原理与人眼相似。人眼能够感知物体的远近,是由于两只眼睛对同一个物体呈现的图像存在差异,也称“视差”。物体距离越远,视差越小;反之,视差越大。视差的大小对应着物体与眼睛之间距离的远近,这也是3D电影能够使人有立体层次感知的原因。
图中点P为空间中待测点,、分别是代表两摄像头的光点,、代表点P在两摄像头成像上两个像素点x轴方向位置,T为两摄像头之间的距离,f是摄像头的焦距,Z为点P到两摄像头的垂直距离。
计算时、是以x轴方向上以左端为原点到、的距离,公式中得到,和两点之间距离。
具体的实现步骤:相机标定(获取相机的内参,外参以及畸变参数,确定三维坐标系和相机图像坐标系的映射关系)——双目校正(将相机标定得到的参数进行消除畸变,然后把两幅图像严格地行对应,使得两幅图像的对极线恰好在同一水平线上,这样一幅图像上任意一点与其在另一幅图像上的对应点就必然具有相同的行号)——双目匹配(把同一场景在左右视图上对应的像点匹配起来,获取视差图)——计算深度信息。
优点:(1)成本适中,精度较高;(2)测量不受障碍物影响;(3)结构简单。
缺点:(1)依赖物体本身的特征点,对表面颜色和纹理特征不明显的物体效果较差;(2)计算量非常大,对计算单元的性能要求非常高;(3)对采光敏感,精度受匹配的精度和正确性影响;(4)测距较近。
ref: